
PROYECTO
Levantamiento Fotogrametrico con RPAS, para la Construccion del Fraccionamiento "Ruba Norte" en Cajeme Sonora, Mexico.
PROYECTO DEL CURSO

Fotogrametría con Drones
REALIZADO POR

Alberto Mendiola Galvan
Introducción.
La fotogrametría se ha convertido en nuestros dias, en una herramienta formidable para la obtención de información cartográfica de calidad y de gran precisión. Con la llegada de los Drones, la fotogrametría cobró un gran impulso y en la actualidad se ha utilizado en inumerables aplicaciones como la geología, dasonomía, en la agricultura, conservación ecológica, en ingeniería, arqueología, planificación, trafico y en inteligencia militar. La fotogrametría con la tecnología de los RPAS ( Sistema de Aereonave Pilotado a Distancia) tiene su principal aplicación en las ciencias de Ingenieria y Topografia principalmente.
Se usa por ejemplo en los levantamientos de tierras para el cálculo de vértices de secciones, o en la determinación de vértices de linderos o puntos que ayuden a fijar esos vértices. En la elaboración de mapas a gran escala con fines multiples, dentro de los cuales es el diseño de subdiviciones, determinación de las riveras de las costas en los levantamientos hidrográficos, en la determinación con presición de las coordenadas de puntos en tierra en los levantamientos de control, obtencion de perfiles longitudinales y secciones transversales para proyectos de ingeniería.
Por lo tanto la fotogrametría puede definirse como la ciencia, el arte y la tecnología para obtener información confiable de la superficie terrestre a partir de fotografías.
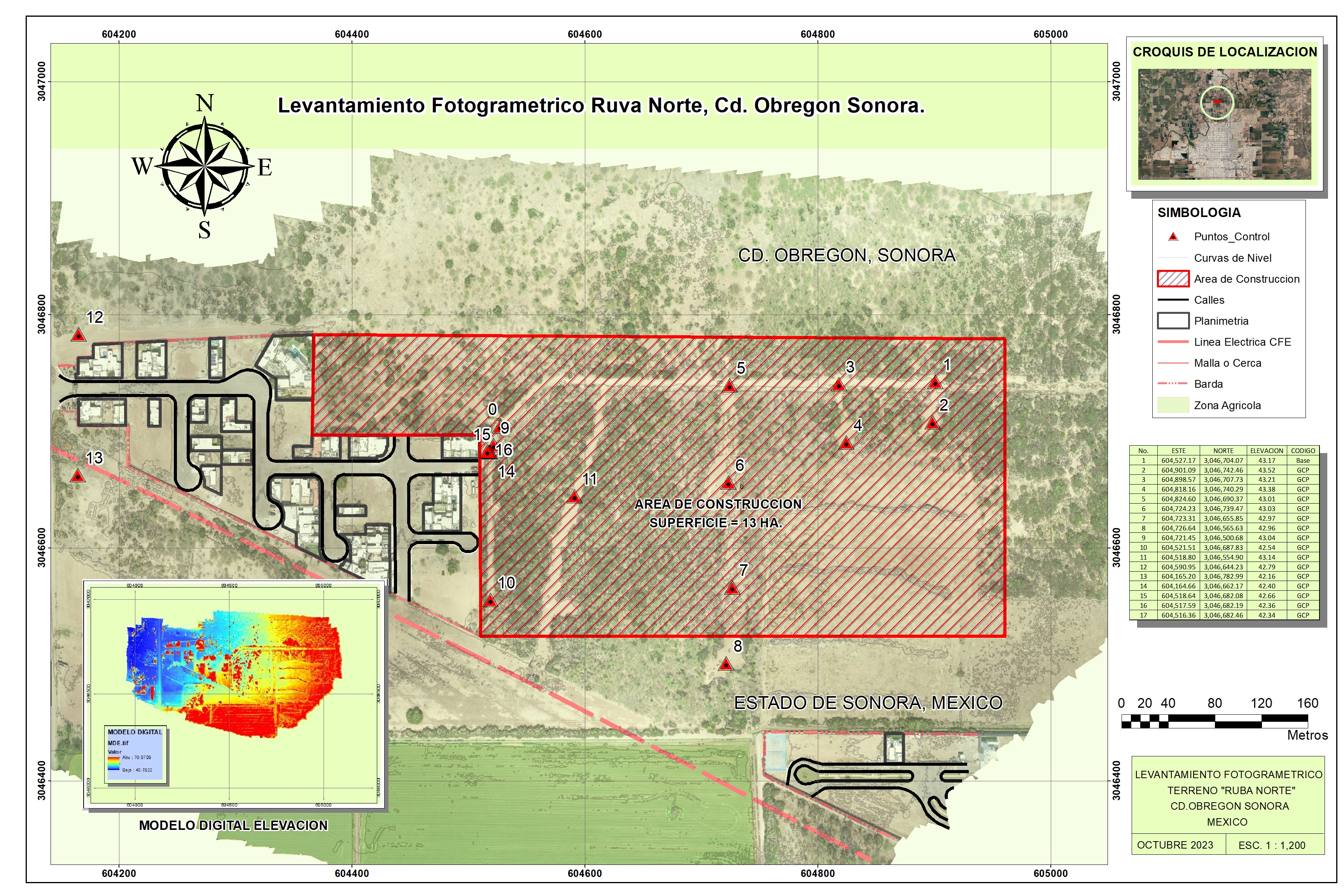
En este proyecto se realizará un levantamiento fotogramétrico en la zona denominada “Ruba Norte”, en el municipio de Cajeme, del estado mexicano de Sonora. Con la finalidad de presentar la Topografia de la zona y sus caracteristicas para la contrucción de un fraccionamiento habitacional, realizando todos los pasos necesarios para la obtención de los tres elementos principales que son: Modelo Digital de Elevaciones (DEM), Ortomosaico y Curvas de Nivel, asi como el Mapa de la zona de Estudio en el programa denominado ArcGIs.
Antecedentes.
Ciudad Obregón es la cabecera municipal de Cajeme, se ubica entre las latitudes Norte 27-28 y 27-31, y entre las longitudes Oeste 109-55 y 109-58. El municipio de Cajeme se constituye a partir de 7 provicias; El municipio de Cajeme, del estado mexicano de Sonora, tiene una superficie de 4,876.3 km2 con una poblaciòn total de 436,484 habitantes. Ver imagen siguiente:
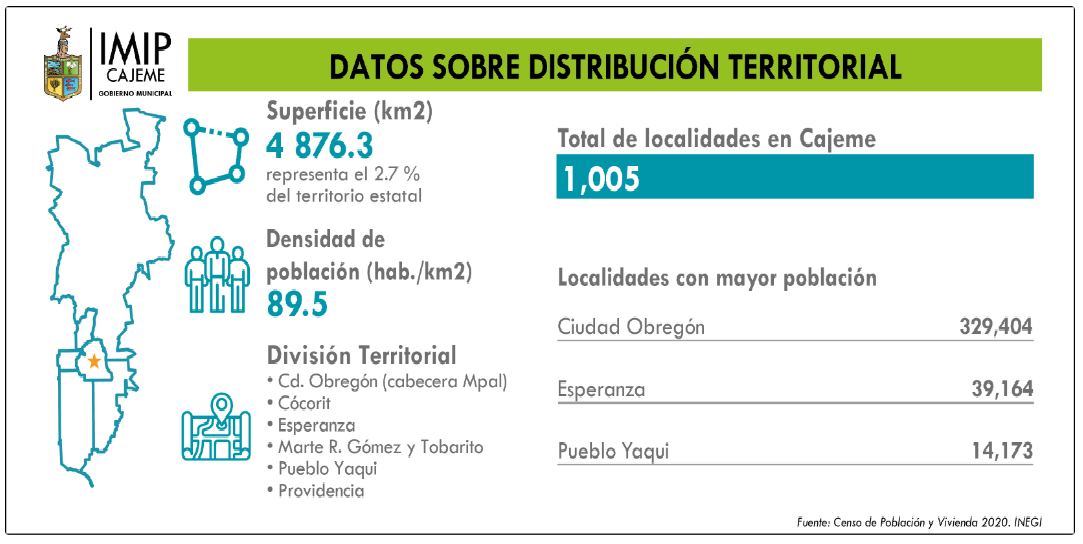
Imagen de Datos de la Distribucion Territorial.
El clima del municipio de Cajeme es de seco a muy seco, teniendo temperaturas maximas promedio de 45 grados centigrados y mínimas de hasta -2 grados centigrados. La vegetacion esta constituida principalmente por plantas del tipo matorrales, cactus y mezquites.
En el año 2000 se desarrollo un programa de reordenamiento urbano y regional, que contempla las zonas propensas a la construccion de viviendas o fraccionamiento hasta el año 2050. Con la finalidad de orientar en forma efectiva el desarrollo del área de forma equitativa, sostenible y con respeto al medio ambiente.
Dentro de este programa de reordenamiento urbano y regional , se contempla la construcción de una serie de fraccionamientos habitacionales en un área total de 264 hectáreas, la construcción esta contemplada para iniciar en el año 2010. Hasta el momento la construcción de los fracionamiento se ha comenzado de forma lenta.
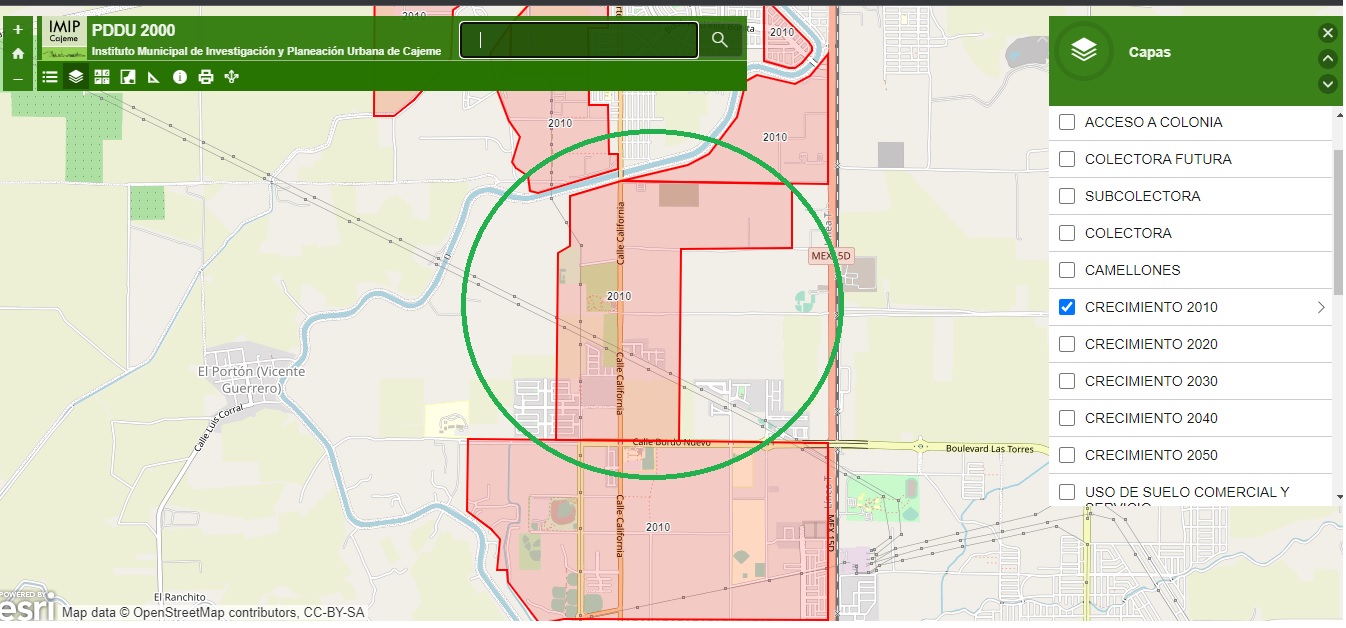
Plan de Desarrollo Urbano zona de Construcción para el año 2010.
Descripción del área de Estudio.
Con la finalidad de obtener los productos cartograficos necesarios para la planeación urbana de los fraccionamientos, se nos pidio elaborar un levantamiento fotogramétrico de la zona denominada “Ruba Norte”. Esta zona contempla una superficie de aproximadamente 23 hectareas y se encuentra en la colonia llamada Santa Catarina.
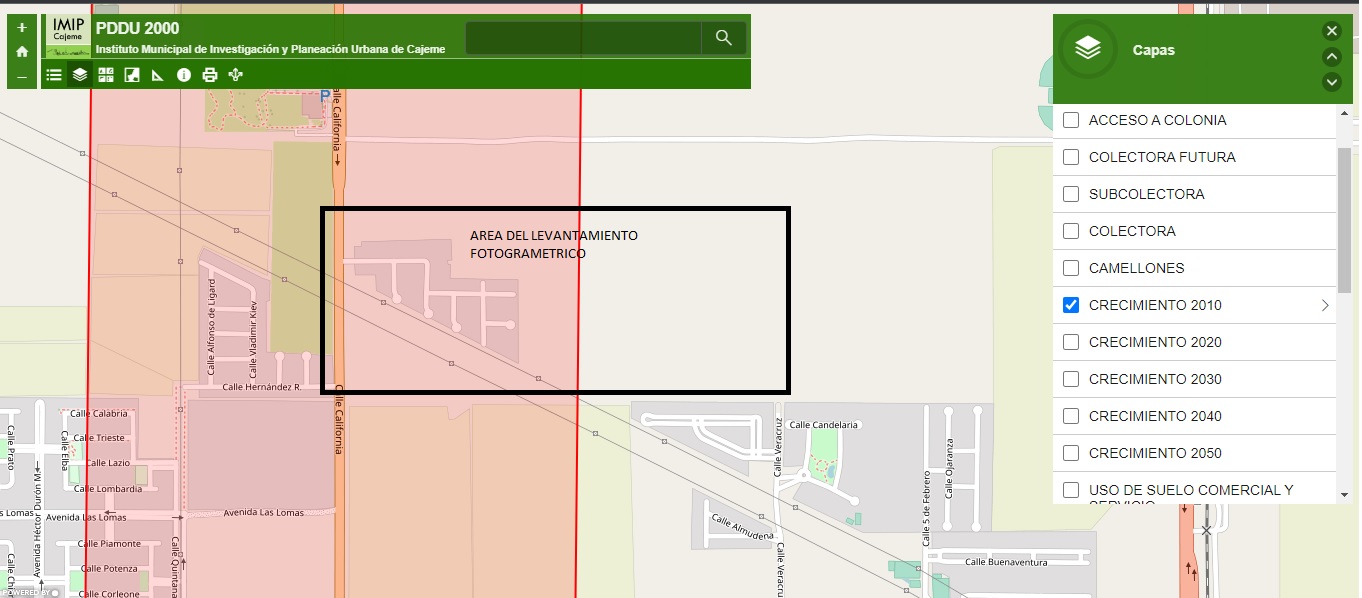
Zona Denominada “Ruba Norte” y futura Colonia de Santa Catarina.

Imagen Satelital de Área de los Trabajos Fotogramétricos.
Objetivos del Proyecto.
Los objetivos especificos a realizar, en nuestro vuelo fotogramétrico son los siguientes:
- Reconocimiento de Campo.
- Delimitación de la zona de estudio a partir de un poligono creado en Google Earth.
- Colocación y medición de los puntos de control con posicionamiento GNSS dentro del área de estudio.
- Planeación y Vuelo Fotogrametrico.
- Realización del Postprocesamiento en gabinete, para la obtención de la Nube de Puntos Densa, el Modelo Digital de Elevaciones (DEM), Ortomosaico y generación de las Curvas de NIvel.
- Generación del Reporte final.
- Elaboración de Mapa de contenidos en ArcGis.
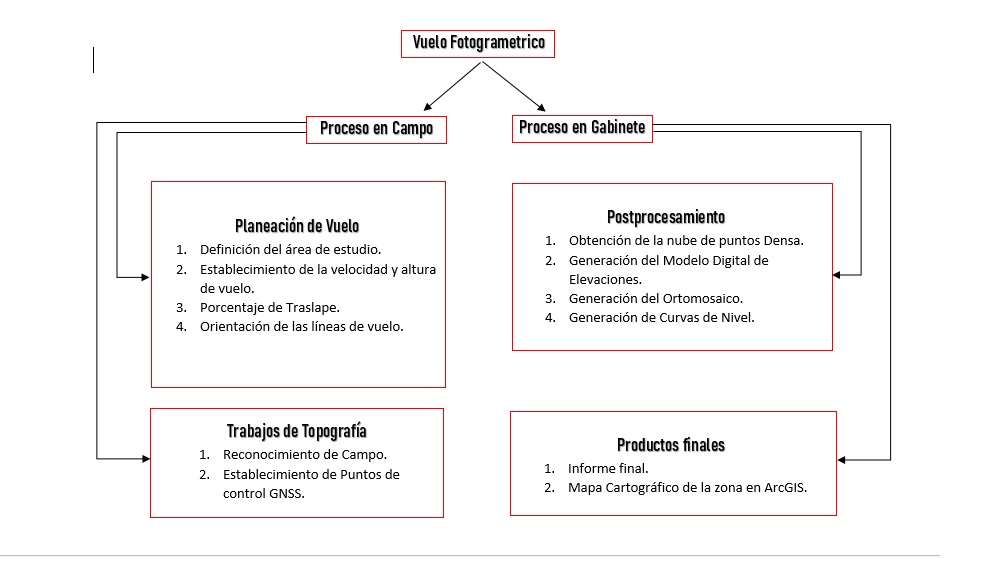
Procedimiento.
Trabajos de Topografía.
Reconocimiento de Campo.
Se realizó una visita en campo para conocer la zona del proyecto habitacional, observamos que el clima es seco con una vegetacion escasa, arbustos chicos y con buena ubicación cerca de la ciudad. Existe una linea de transmisión electrica por lo que la altura del vuelo sera mayor a lo que normalmente se aconseja. Existen espacios en el terreno en donde no hay vegetación por lo que sera un sitio ideal para la colocación de los puntos de control fotogramétricos y ubicación de la zona de despegue y aterrizaje de nuestra aereonave.

Personal y cuerpo de ingenieros en la zona de estudio.
Para el inicio de los trabajos fotogrametricos, se nos proporciono el poligono envolvente de la zona de estudio. El formato se nos entrego en KML para ser visto con el programa Google Earth.

Zona de Estudio de 23 ha.
Establecimiento de Puntos de Control.
Para nuestros trabajos topográficos fue fundamental la realización del control terrestre, este control se realizó colocando estacas con clavo en la zona del proyecto y marcadas con cal para que se mostraran en las fotografias y poder realizar la fotoidentificación de los puntos posteriormente en gabinete.
Las coordenadas y elevaciones de los puntos de control se realizo con un equipo GPS diferencial de la marca South modelo G7, con un tiempo de posicionamiento de una hora. Posteriormente se realizo el posproceso de los datos rinex obtenidos con el programa Cube de Stonex calculando las siguientes coordenadas de los puntos de control.
| Punto | Este | Norte | Elevacion | Codigo |
| 1 | 604527.171 | 3046704.070 | 43.169 | Base |
| 2 | 604901.091 | 3046742.456 | 43.516 | GCP |
| 3 | 604898.569 | 3046707.726 | 43.212 | GCP |
| 4 | 604818.157 | 3046740.292 | 43.382 | GCP |
| 5 | 604824.601 | 3046690.370 | 43.008 | GCP |
| 6 | 604724.231 | 3046739.468 | 43.025 | GCP |
| 7 | 604723.310 | 3046655.851 | 42.970 | GCP |
| 8 | 604726.644 | 3046565.625 | 42.960 | GCP |
| 9 | 604721.450 | 3046500.677 | 43.040 | GCP |
| 10 | 604521.506 | 3046687.825 | 42.539 | GCP |
| 11 | 604518.798 | 3046554.899 | 43.136 | GCP |
| 12 | 604590.946 | 3046644.234 | 42.789 | GCP |
| 13 | 604165.198 | 3046782.989 | 42.163 | GCP |
| 14 | 604164.663 | 3046662.172 | 42.403 | GCP |
| 15 | 604518.639 | 3046682.077 | 42.656 | GCP |
| 16 | 604517.591 | 3046682.188 | 42.358 | GCP |
| 17 | 604516.362 | 3046682.462 | 42.338 | GCP |
En total fueron colocados 17 puntos de control, para tener el mejor ajuste necesario del modelo al sistema de referencia local. En este caso el sistema de referencia local para México es el denominado Marco de Referencia Internacional Terrestre Geodésico IRTF 08 a la epoca 2010.0 con elipsoide de revolución WGS 84 y con zona geografica de proyección UTM zona 12 norte; obtenido del Instituto Nacional de Estadistica y Geografía (INEGI).
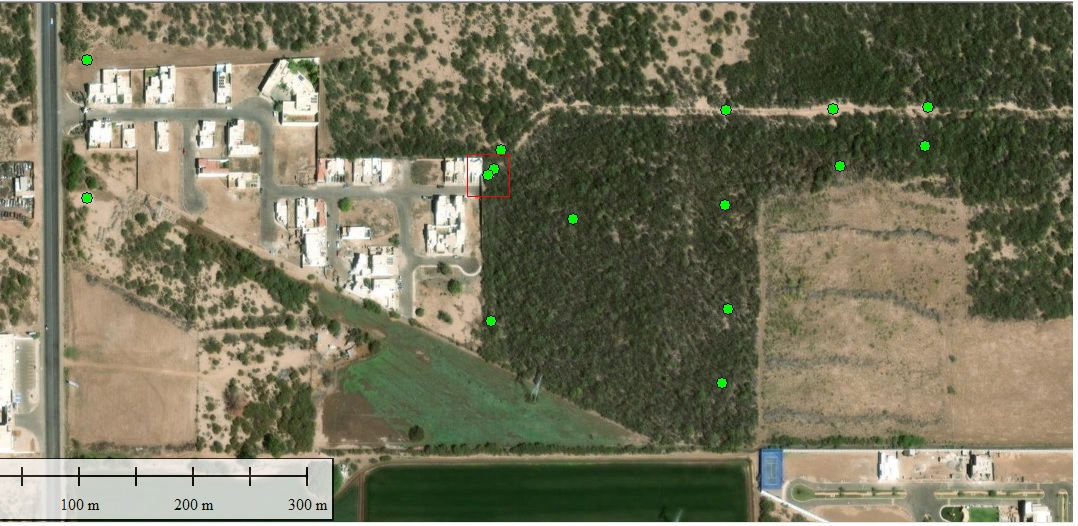
Mapa de la localización en sitio de los puntos de control fotogramétricos.
Planeación de Vuelo.
Para los trabajos fotogramétricos se utilizó un equipo Dron marca DJI modelo Phantom 4, el cual utiliza la aplicaciòn GS RTK para la planificación de las rutas de vuelo.
Se comenzó realizando las configuraciones básicas como las unidades de medidas en metros, las unidades de áreas en metros cuadrados, la selección del tipo de mapa como el MapBox que es una versión parecida al Google Earth. Posteriormente la aplicación GS RTK contiene una opción que nos permite importar el poligono del area de vuelo o de la zona de estudio en formato KMZ, así como también nos brinda la posibilidad de crear nuestro propio poligono. En esta ocasión importamos el archivo KMZ anteriormente mencionado para tener bien definido nuestra área de estudio para nuestro vuelo fotogramétrico a realizar.
Para nuestro plan de vuelo, en la aplicación GS RTK elegimos la opción de “2D Photogrametry”. Esta opción para los requerimientos de nuestro vuelo es la más básica, ya que nos permite utilizar una altura de vuelo constante en donde el terreno no presenta muchos relieves y tener asi la informacion fotografica de la zona necesaria para el trabajo de gabinete. Ya importado nuestro poligono se procedio a orientar la ruta de vuelo con la finalidad de optimizar el área de cobertura y el tiempo de vuelo.
Definido y optimizado nuestra ruta de vuelo, se procedio a ingresar los parámetros como son la altura de vuelo y la velocidad, que para nuestro proyecto fue de 110 m de altura con una velocidad de 8 km/h.
La aplicación GS RTK nos permite definir los parametros de toma de fotografía ya sea por tiempo o por distancia. Para nuestro proyecto se eligio por distancia. También configuramos los parametros de la cámara, los balances de blancos (Condiciones Meteorológicas), tiempor de exposición y los ángulos de la cámara ( 90 grados para nuestro proyecto), asi como el traslape de fotografía. ( 70% para nuestro proyecto, en horizontal y vertical). Con estos parámetros iniciamos el vuelo fotogramétrico.
Como se nos ha dicho, estos vuelos son totalmente autónomos por lo que procuramos tener las siguientes recomendaciones de seguridad para el RPas:
- Tener área de despegue y aterrizaje.
- Asegurar bien el equipo que este armado y asegurado.
- En campo se aseguro que una persona tuviera contacto visual en todo momento con la aereonave.
- Se realizo el vuelo en horas de la mañana.
- Se cuido que no hubiera viento fuerte.
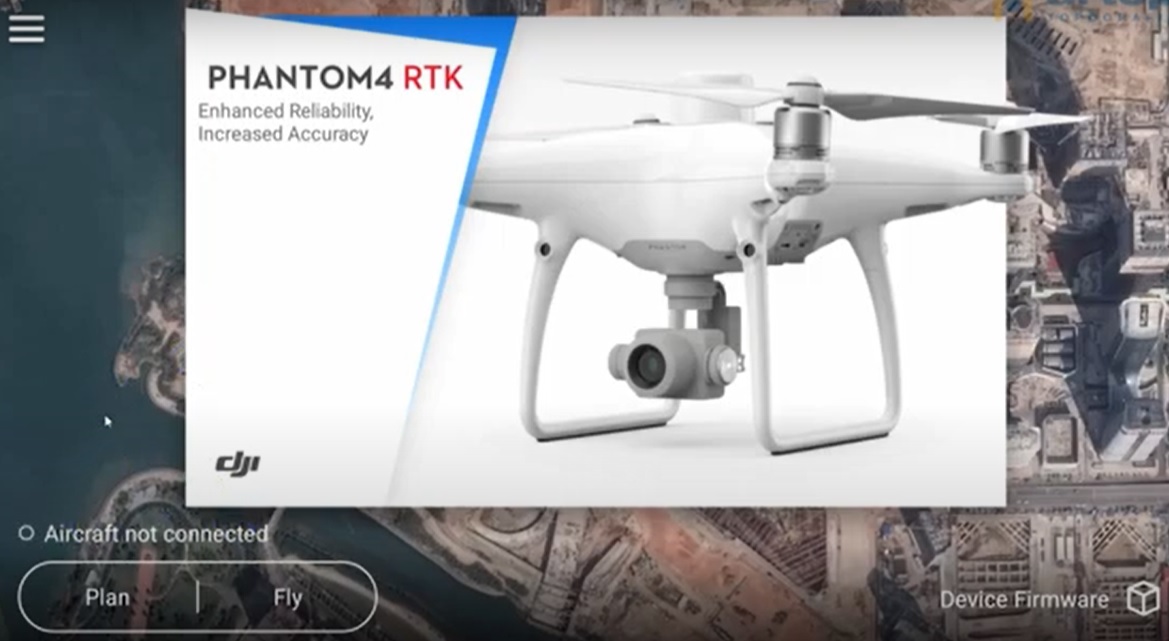
Imagen de la aplicación GS RTK incorporada en el comando.
Posprocesamiento (Trabajo en Gabinete).
Para iniciar los trabajos de posprocesamieto, se utilizo el programa llamado Agisoft Metashape Professional. Primero se descargaron las fotografias del Rpas a la computadora. Con el programa Agisoft Metashape Professional se importaron las imagenes para obtener la nube de puntos dispersa, realizandose el proceso de orientacion de las cámaras.
Se importaron las coordenadas de los puntos de fotocontrol para optimizar el modelo de la nube de puntos dispersa y referenciar asì el modelo, convirtiendo las coordenadas geográficas a coordenadas de proyección UTM.
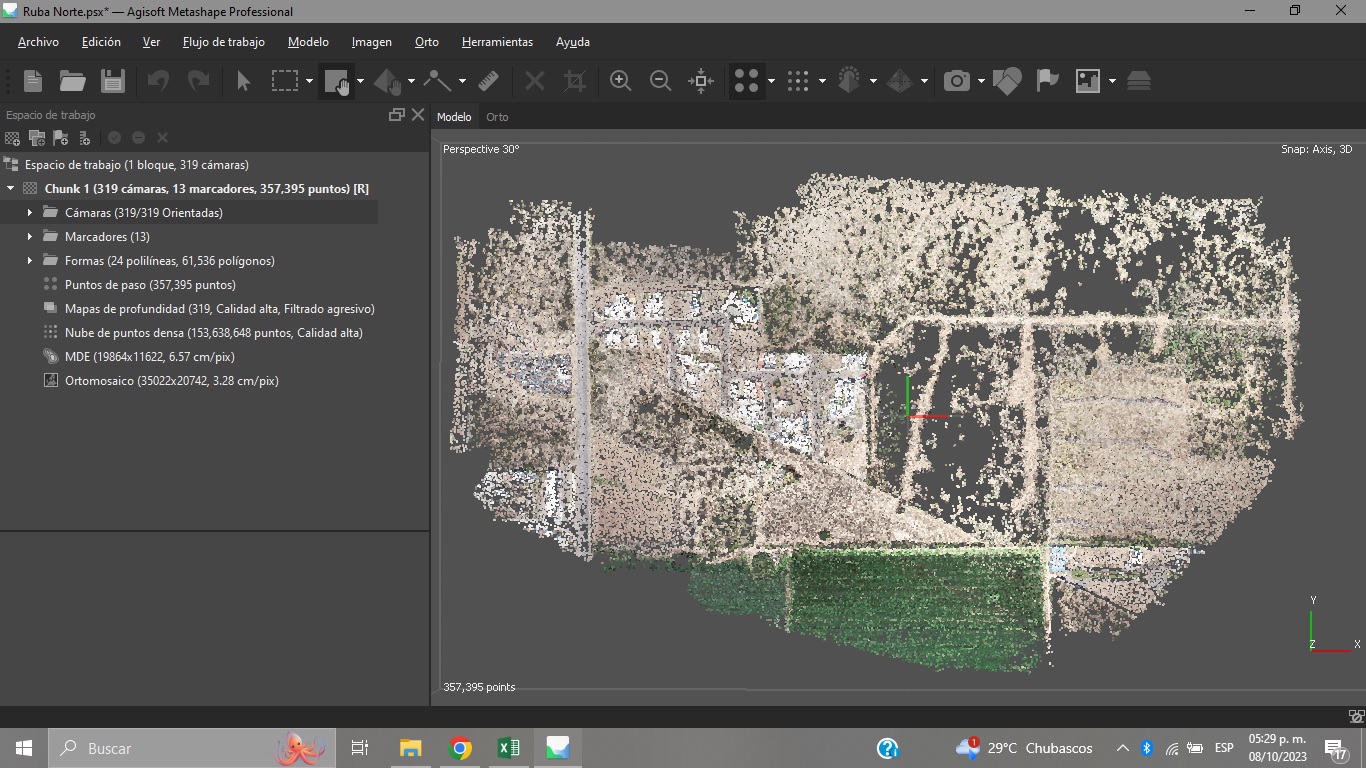
Imagen de la nube de puntos dispersa con el programa Agisoft Metashape Professional.
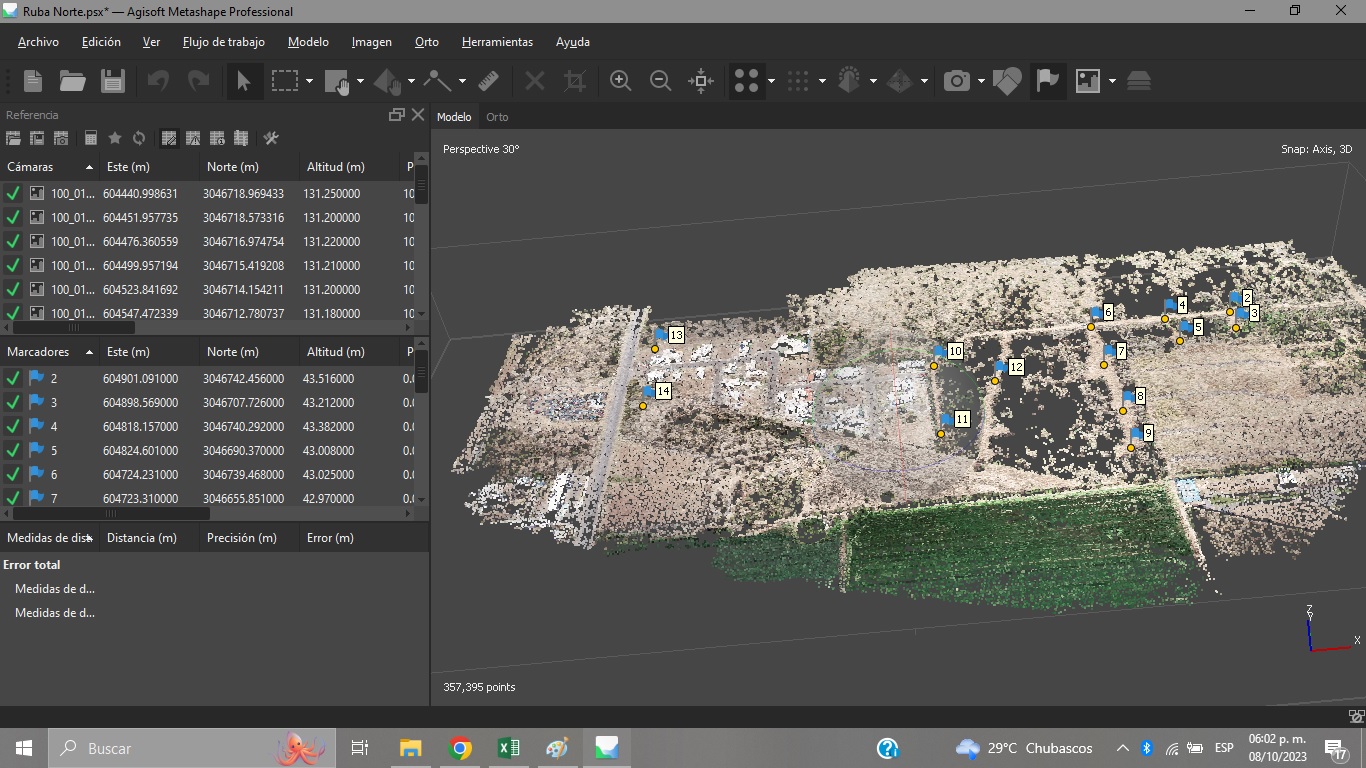
Imagen que muestra los puntos de fotocontrol con el modelo ya optimizado.
Ya realizado el procedimiento de orientacion y optmizacion del modelo, se procedio a obtener la nube de puntos densa.
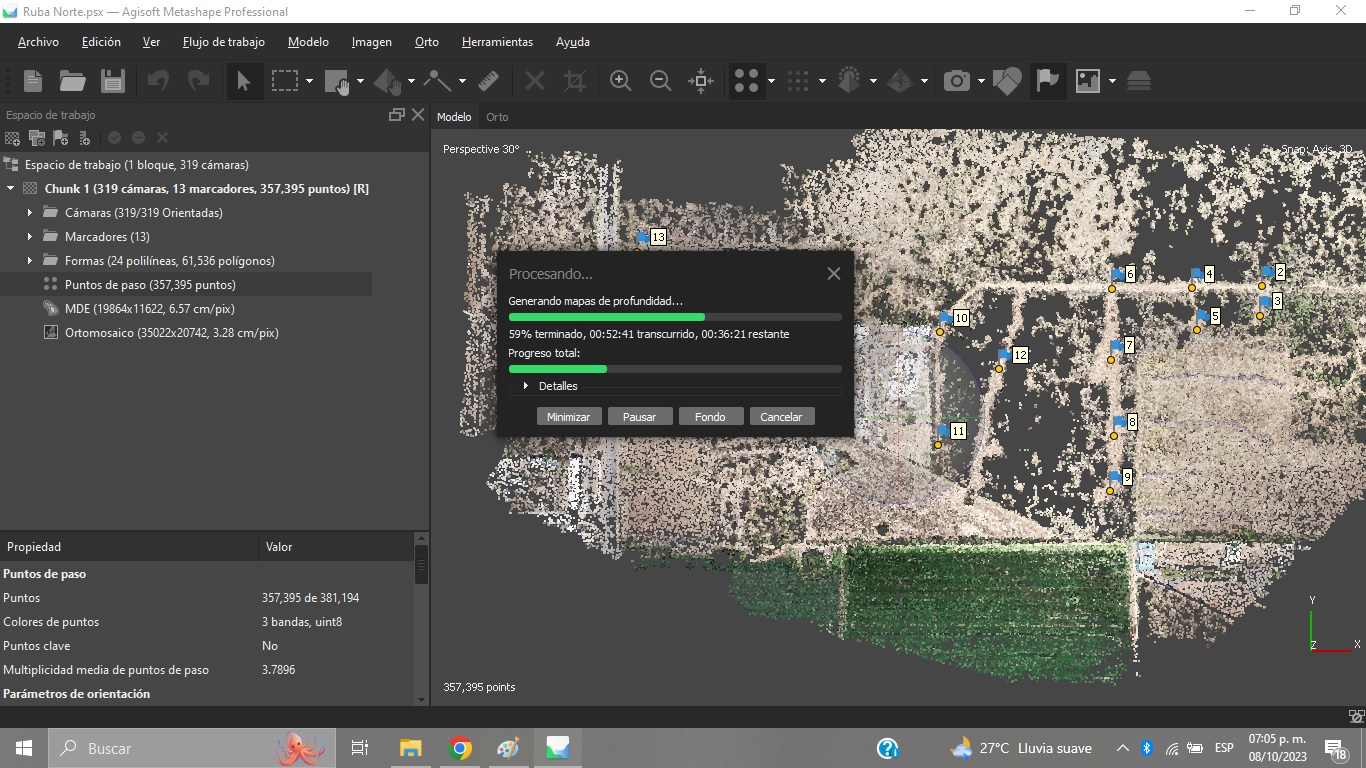
Proceso de obtención de la nube de puntos densa.
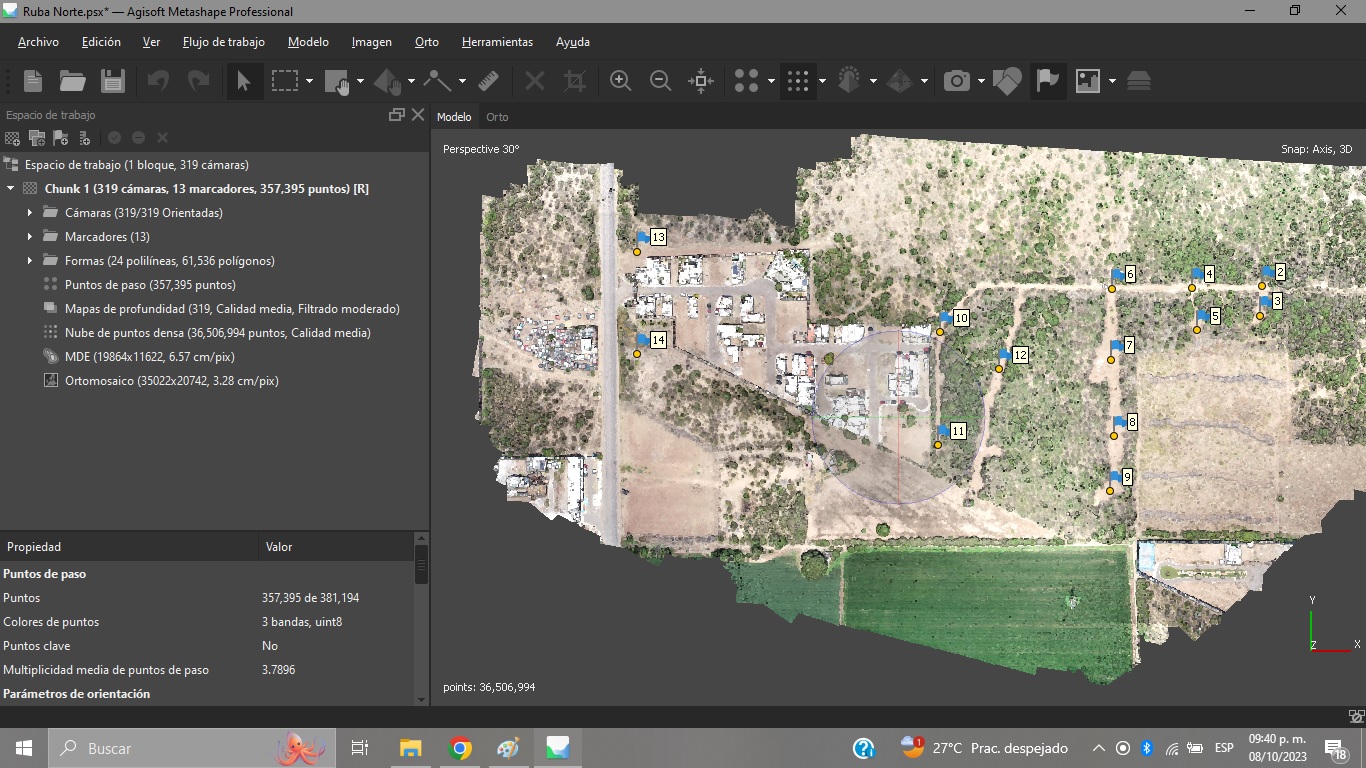
Imagen de la obtencion de la nube de puntos densa.
Generado la nube de puntos densa, con las herramientas del programa Agisoft Metashape Professional se procedio a obtener el modelo digital de elevaciones (DEM), el ortomosaico y por ultimo las curvas de nivel con una equidistancia de 1 m.
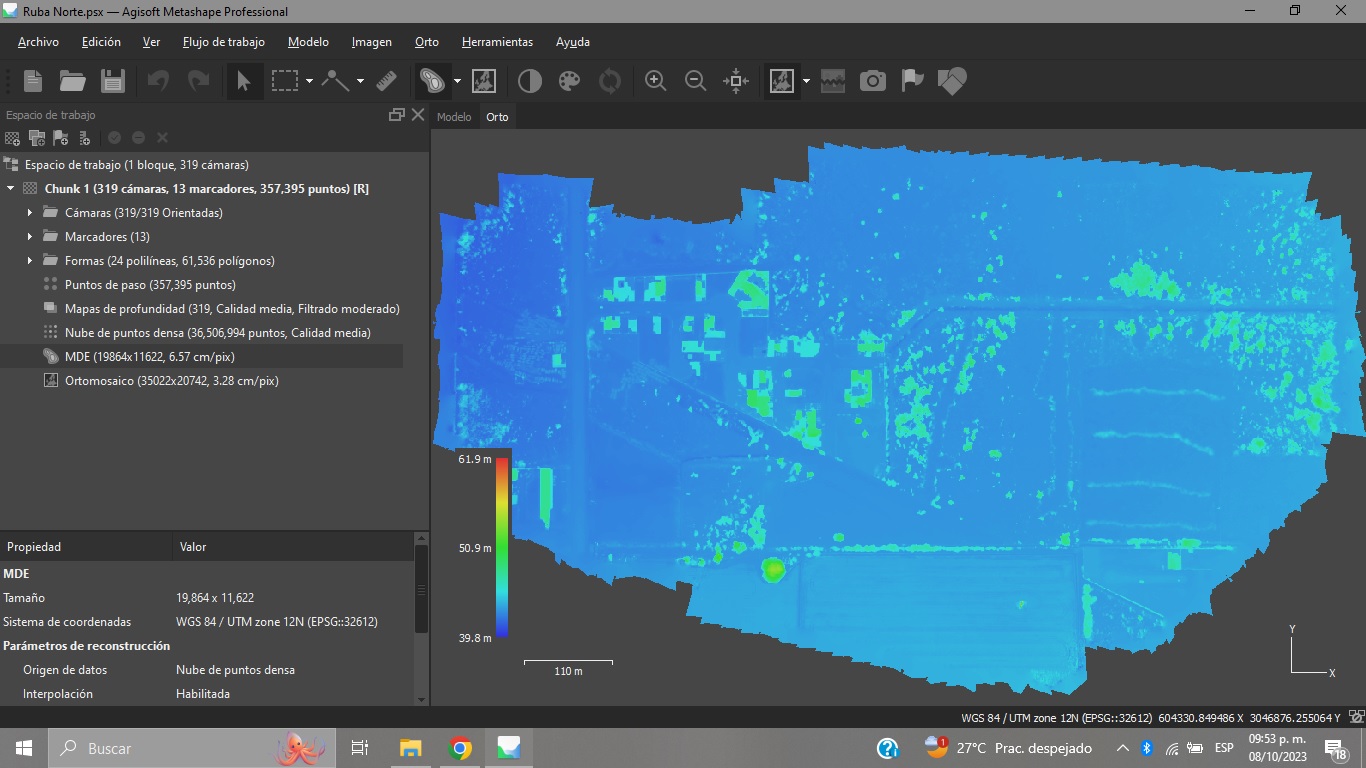
Imagen del Modelo Digital de Elevaciones.
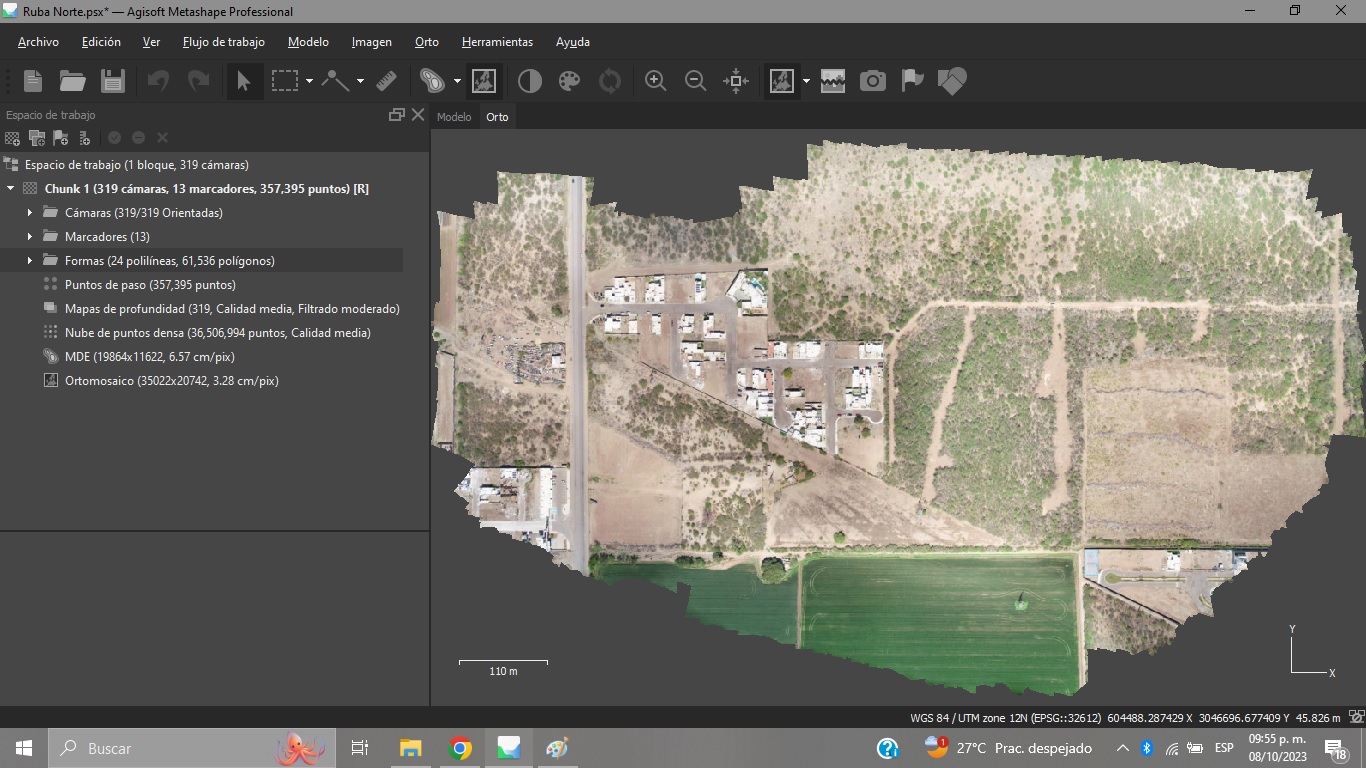
Imagen del Ortomosaico.
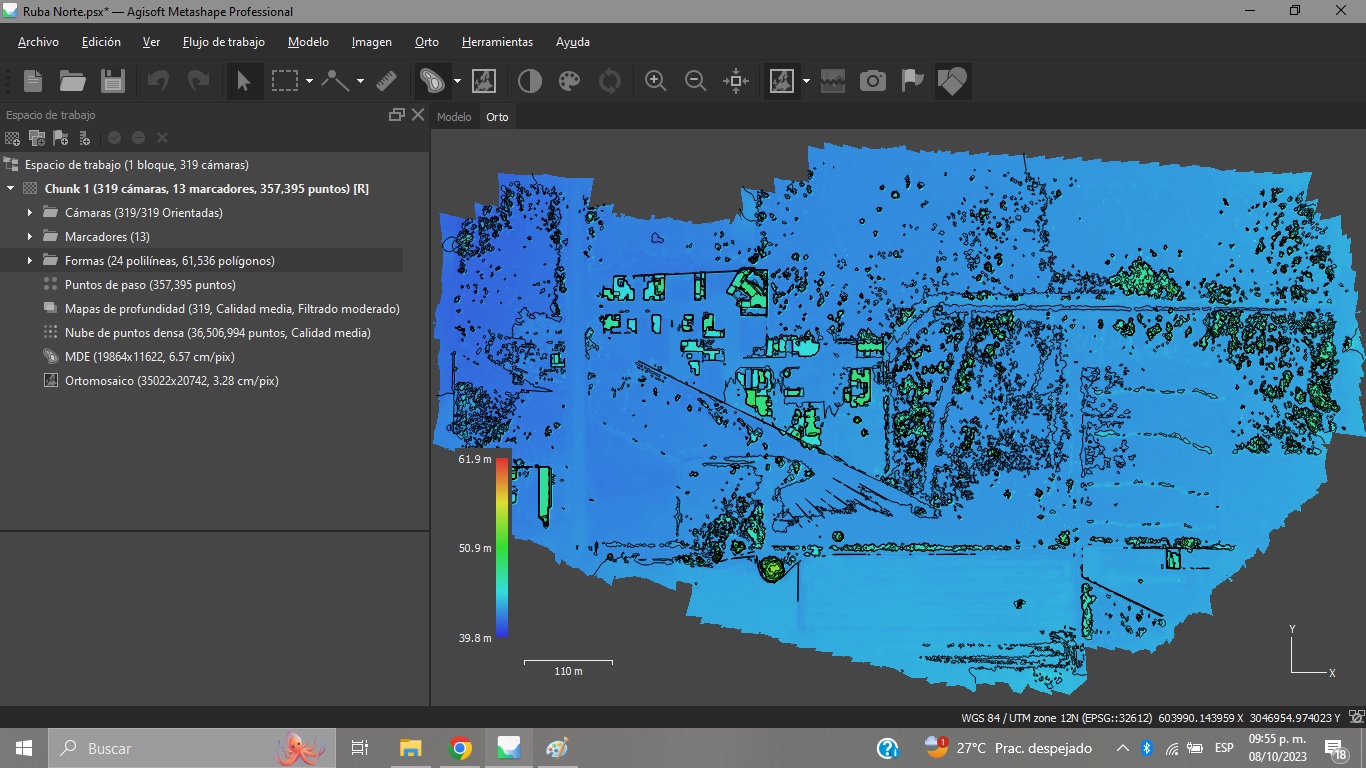
Imagen de la generación de las curvas de nivel a una equidistancia de 1m.
Resultados.
Conclusiones y Recomendaciones.
Durante la visita de campo, se reunió personal técnico así como gente habitantes de la zona. Se realizó una explicación detallada del proyecto y se firmaron minutas.
Se verificó en campo los límites del terreno a partir del polígono realizado en Google Earth, colocando balizas para la delimitación física de la zona del área de construcción.
Se colocaron 17 puntos de control repartidos en toda la zona del área de construcción, incluyendo los fraccionamientos habitacionales existentes, para tener un mejor conocimiento de la zona. Los puntos de control contienen un error relativo de 2.47 cm, que para las necesidades del proyecto fue suficiente.
Se obtuvo un total de 319 fotos, las fotografías fueron tomadas a una altitud media de 110 metros, alcanzando un precisión de resolución del terreno de 3.28 cm/pix, cubriendo un área total de 0.233 km2.
Se obtuvo un total de 36,506,994 puntos para formar la nube de puntos densa, obteniendo un modelo digital de elevaciones, un orto mosaico y curvas de nivel a cada 1 metro.
Como producto final se realizo el mapa cartográfico, el cual contiene:
- Grillado de Coordenadas.
- Escala Grafica y Numérica.
- Membrete.
- Orientación al Norte.
- Leyenda.
- Titulo de Mapa.
El mapa cartográfico se realizó en la plataforma de ArcGis, el cual se genero en formato PDF.
Referencia Bibliografía.
Topografía, Paul R. Wolf - Charles D. Ghilani, editorial Alfaomega, 11 va. edición, 2013.
Sistema de información geográfica IMIP Cajeme (Instituto Municipal de Investigación y Planeación Urbana de Cajeme. pagina de internet imipcajeme.org
Elementos para el diseño e implementación de redes Cors GPS y GNSS, Julián Ricardo Rodríguez Valencia, Universidad Distrital Francisco José de Caldas, 2007
REALIZADO POR
Alberto Mendiola Galvan
PROYECTO DEL CURSO
Fotogrametría con Drones
José Oropeza