PROYECTO
LEVANTAMIENTO FOTOGRAMÉTRICO CON RPAS EN EL DISTRITO DE ASIA
PROYECTO DEL CURSO

Fotogrametría con Drones
REALIZADO POR

Brayan D. Nicasio Castañeda
LEVANTAMIENTO FOTOGRAMÉTRICO CON RPAS EN EL DISTRITO DE ASIA
1.INTRODUCCIÓN
El presente informe trata del levantamiento fotogramétrico con un drone Phantom 4 Pro en el distrito de Asia al sur de Lima. Se pretende obtener productos de terreno como modelo digital de terreno, ortomosaico y curvas de nivel a detalle de la zona para su tratamiento en software GIS.
2.ANTECEDENTES
El levantamiento fotogramétrico con RPAS es una técnica relativamente económica considerando costo/beneficio, permite obtener información de la superficie de una manera mucho más rápida que con levantamiento topográfico convencional. Dependiendo del equipo a usar, en un solo vuelo se pueden cubrir vastas extensiones en un tiempo relativamente corto, lo que permite ahorrar en personal y equipos.
Con tecnologías mucho más recientes como los drones RTK/PPK se pueden realizar levantamientos con menos puntos de fotocontrol que en levantamientos convencionales, y estos puntos son para la validación ya que las correcciones se realizan en tiempo real en caso de RTK y en gabinete para el caso de PPK ya que es necesario trabajar con data de receptores GNSS y hacer una interpolación para obtener coordenadas con precisiones de 2-3cm.
3.DESCRIPCIÓN DEL ÁREA DE ESTUDIO
El área de estudio se encuentra ubicada en la zona denominada Alto Bujama en el distrito de Asia, provincia de Cañete, departamento de Lima. Se encuentra a una altura promedio de 15 msnm.
La accesibilidad es a través de la carretera Panamericana Sur, pasando el kilómetro 92 en la primera entrada a la derecha, 500m directo por ese camino, dobla a la derecha y 500m más para llegar.

Fuente: Google Earth Pro
4.OBJETIVOS
Objetivo Principal:
- Realizar el levantamiento fotogramétrico con RPAS de la zona de estudio.
Objetivos Específicos:
- Realizar el planeamiento de vuelo
- Realizar el procesamiento de las fotografías en el software Agisoft Metashape
- Realizar el tratamiento de los productos obtenidos en software GIS
5.METODOLOGÍA

Fuente: Elaboración Propia
FASE DE PRE-CAMPO
La fase de pre-campo requiere un archivo vectorial shp o kmz de la zona donde se realizará el levantamiento, se debe revisar si existe alguna restricción para realizar el vuelo, si se requiere algún permiso o si es una zona prohibida para el uso de RPAS, esto puede deberse a la proximidad con algún aeropuerto o pista de aterrizaje. Estas zonas se pueden ver en la siguiente página: https://www.dji.com/flysafe/geo-map
Debe observarse también la presencia de torres de alta tensión, aves territoriales, o cualquier cosa que pueda interrumpir u obstaculizar el vuelo fotogramétrico.
También debe considerarse el relieve de la zona a levantar, si se trata de una zona llana o ligeramente ondulada no habría inconveniente; si se tratase de una zona moderada o fuertemente ondulada, puede que se requiera realizar el levantamiento por secciones para así conseguir el nivel de precisión requerido y ya en gabinete realizar el merge de los productos.
Para el caso del presente levantamiento, se ha de realizar en el distrito de Asia y no habría inconveniente ya que es una zona sin edificaciones u objetos de gran altitud.
Se verifica la accesibilidad, se solicitan los permisos necesarios y se adquieren los materiales a utilizar en campo como dianas, yeso, clavos, etc.
Al tratarse de un levantamiento convencional se requieren dianas para los puntos de fotocontrol y equipos de topografía como una estación total para obtener las coordenadas de las mismas a partir de dos puntos de coordenadas conocidas.
FASE DE CAMPO
La ejecución del vuelo fotogramétrico se debe realizar en horas de la mañana, es recomendable que sea entre las 10 y 13 horas, para evitar vientos fuertes y sombras debido al ángulo de elevación del sol.
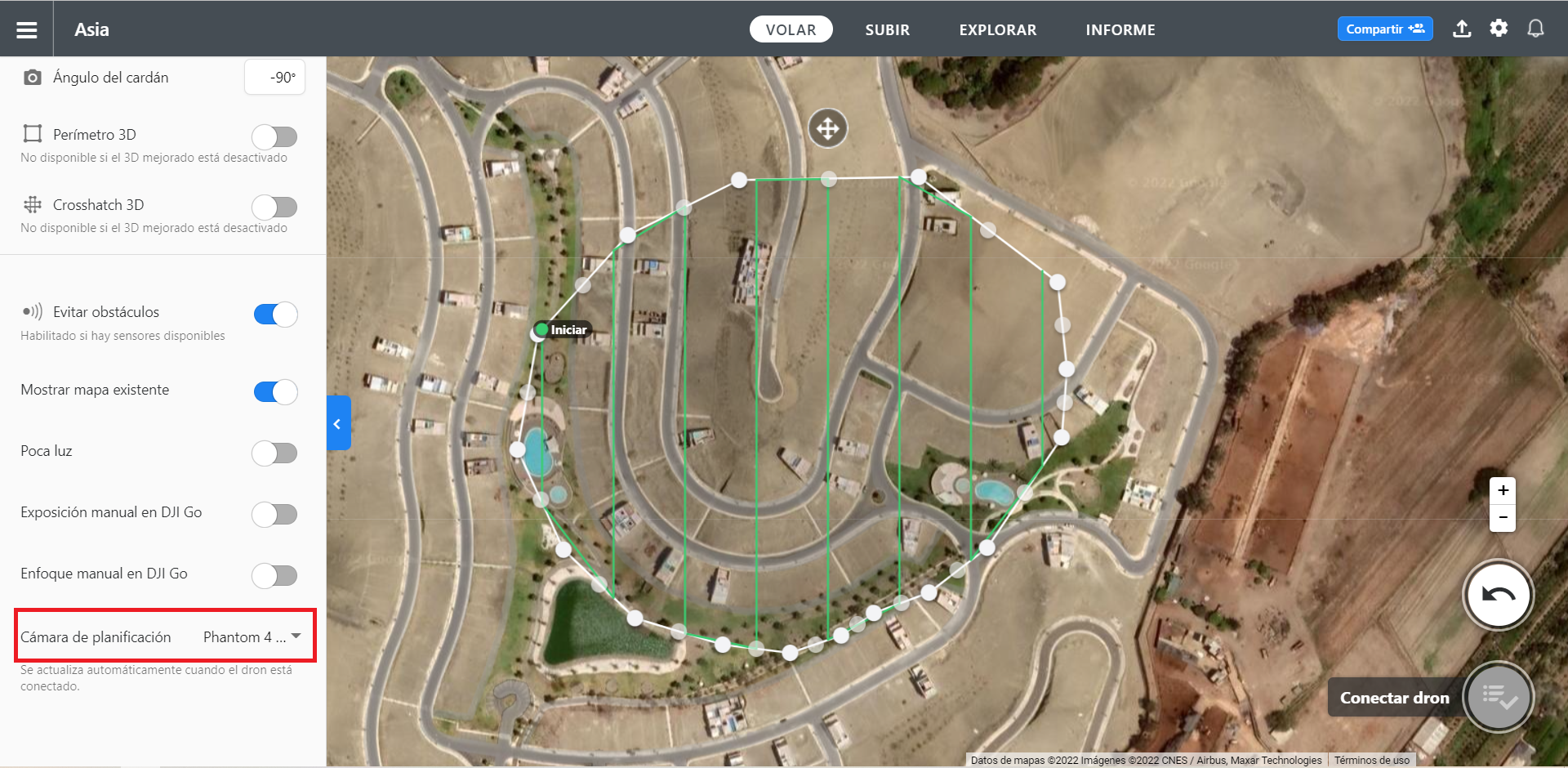
Se debe tener el drone equipado, calibrado y con las baterías cargadas, también la tablet y el control del equipo. En la aplicación se carga el archivo KML de la zona de vuelo. El drone seleccionado a utilizar es un Phantom 4 Pro.
Se ubican las dianas siguiendo una distribución homogénea dentro del área de levantamiento, se debe considerar poner un punto el menos en zonas donde haya depresiones y otro en zonas elevadas para que la georreferenciación se realice de forma precisa. Con receptores geodésicos o equipos topográficos se obtienen las coordenadas de los puntos de fotocontrol. Indicar junto a las dianas el número del punto. Para el presente levantamiento se ubicaron 7 puntos de fotocontrol para una extensión de 6 hectáreas.

Fuente: Elaboración Propia
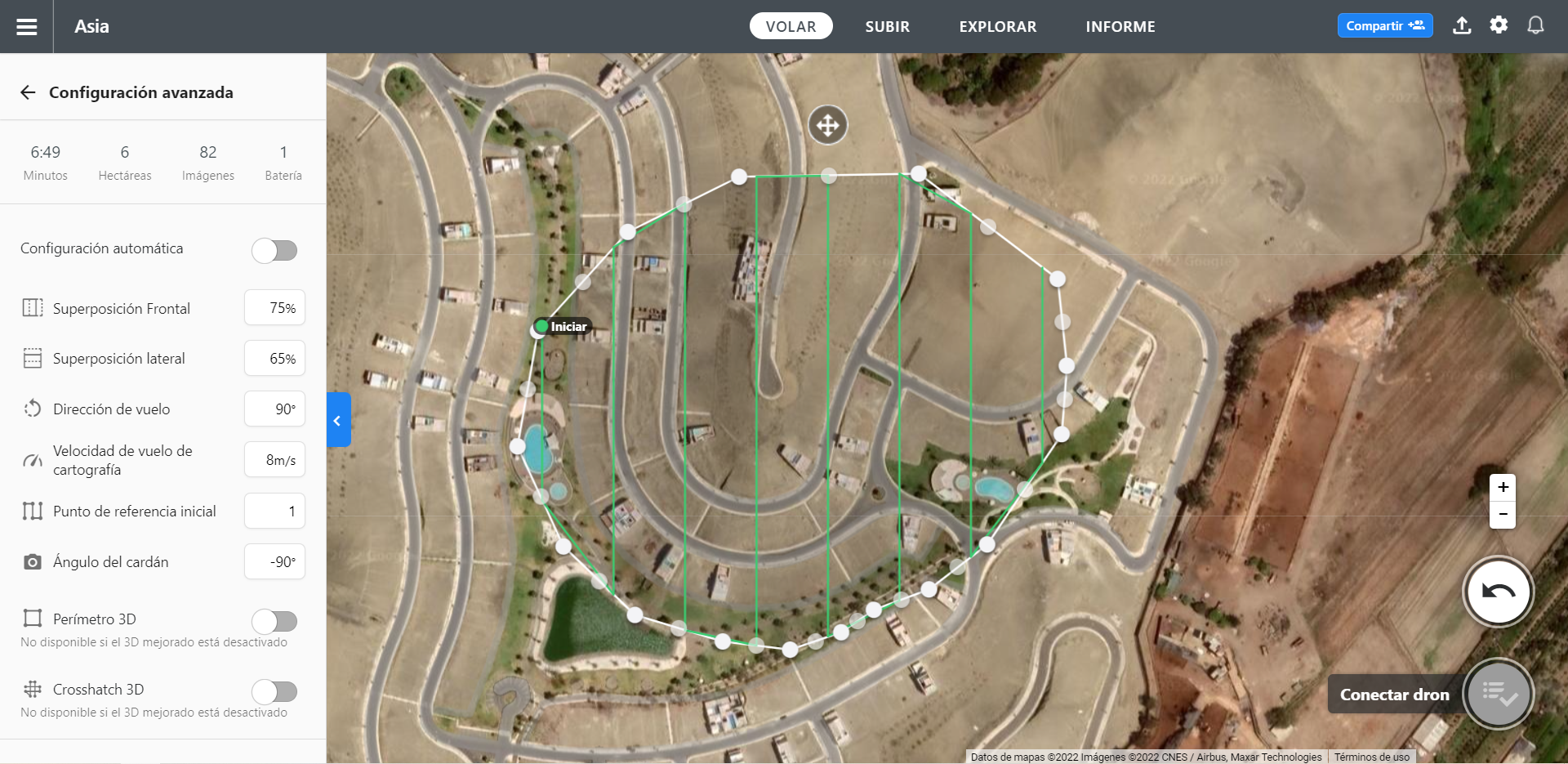
En la captura de pantalla se observa el polígono de la zona de vuelo y en el panel izquierdo la altura de vuelo 80m para el presente vuelo, el tiempo de vuelo de 6.49 minutos, el área a cubrir de 6 hectáreas, el total de fotos a capturar de 82 y la cantidad de baterías a usar.
Fuente: Elaboración Propia
En el menú de opciones avanzadas se puede establecer manualmente el traslape longitudinal, el traslape transversal, la orientación de las líneas de vuelo y la velocidad máxima de vuelo.
La orientación de las líneas de vuelo es utilizada sobre todo cuando se levantará una zona con una alta densidad de edificaciones, permite reducir algunos errores de perspectiva central de las fotografías. La velocidad máxima de vuelo debe ser especificada para algunos drones debido a la forma en que las cámaras realizan la captura de la imagen, algunas realizan la captura en un solo paso y otras en forma de barrido, en la última mencionada, debido a una alta velocidad puede producir deformaciones y errores en las fotografías.
Para el presente caso el traslape longitudinal es de 75%, el traslape transversal de 65%, la dirección de vuelo 90º y la velocidad máxima de vuelo de 8m/s.
Fuente: Elaboración Propia
Una vez verificada la operatividad del drone, ubicados los puntos de fotocontrol, determinados los parámetros de vuelo, se ubica el drone en una superficie plana despejada en un radio de 5 metros y se inicia el vuelo. Es importante que el piloto del equipo verifique la consola del equipo y el porcentaje de batería y que un ayudante de vuelo, provisto de binoculares observe en todo momento en qué lugar se encuentra el drone. La ejecución del vuelo se realiza de forma completamente automática, ya que la app se encarga de ubicar las líneas de bueno, determinar la altura y el punto de inicio de acuerdo a los parámetros ingresados.
Cuando el vuelo haya finalizado, el equipo regresará al punto inicial y aterrizará; si se presentase algún inconveniente o apareciera algún ave territorial, el piloto puede pilotar el equipo en modo manual y hacerlo volver a la zona de despegue. Considerar que debido a la distancia entre el operador y el drone durante la ejecución del vuelo, y a factores telemétricos, el drone podría desconectarse del control, esto dependerá de la aplicación que se esté utilizando, en caso ocurriese puede que el equipo regrese a la zona de aterrizaje o continúe de acuerdo a su configuración.
FASE DE GABINETE
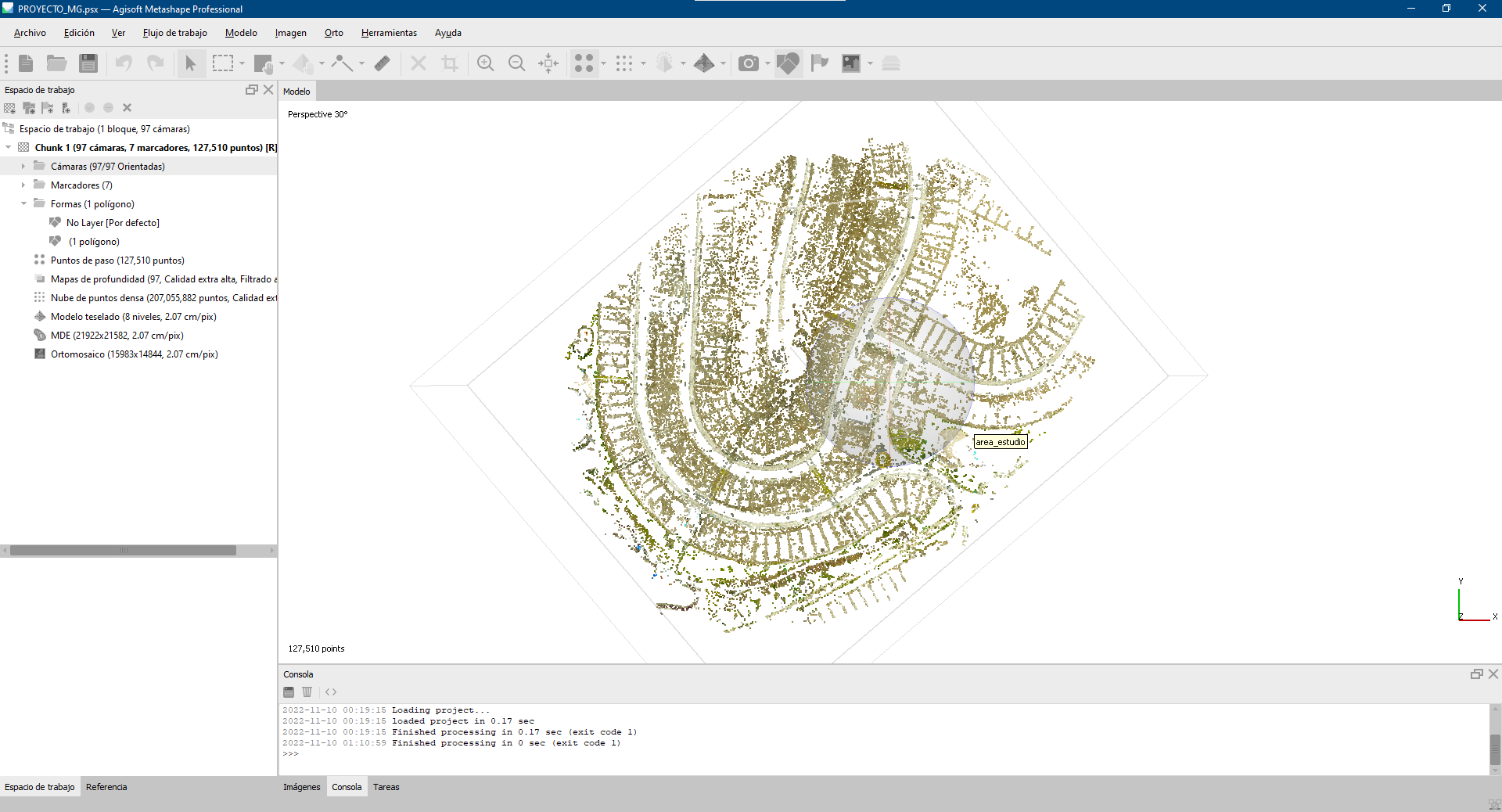
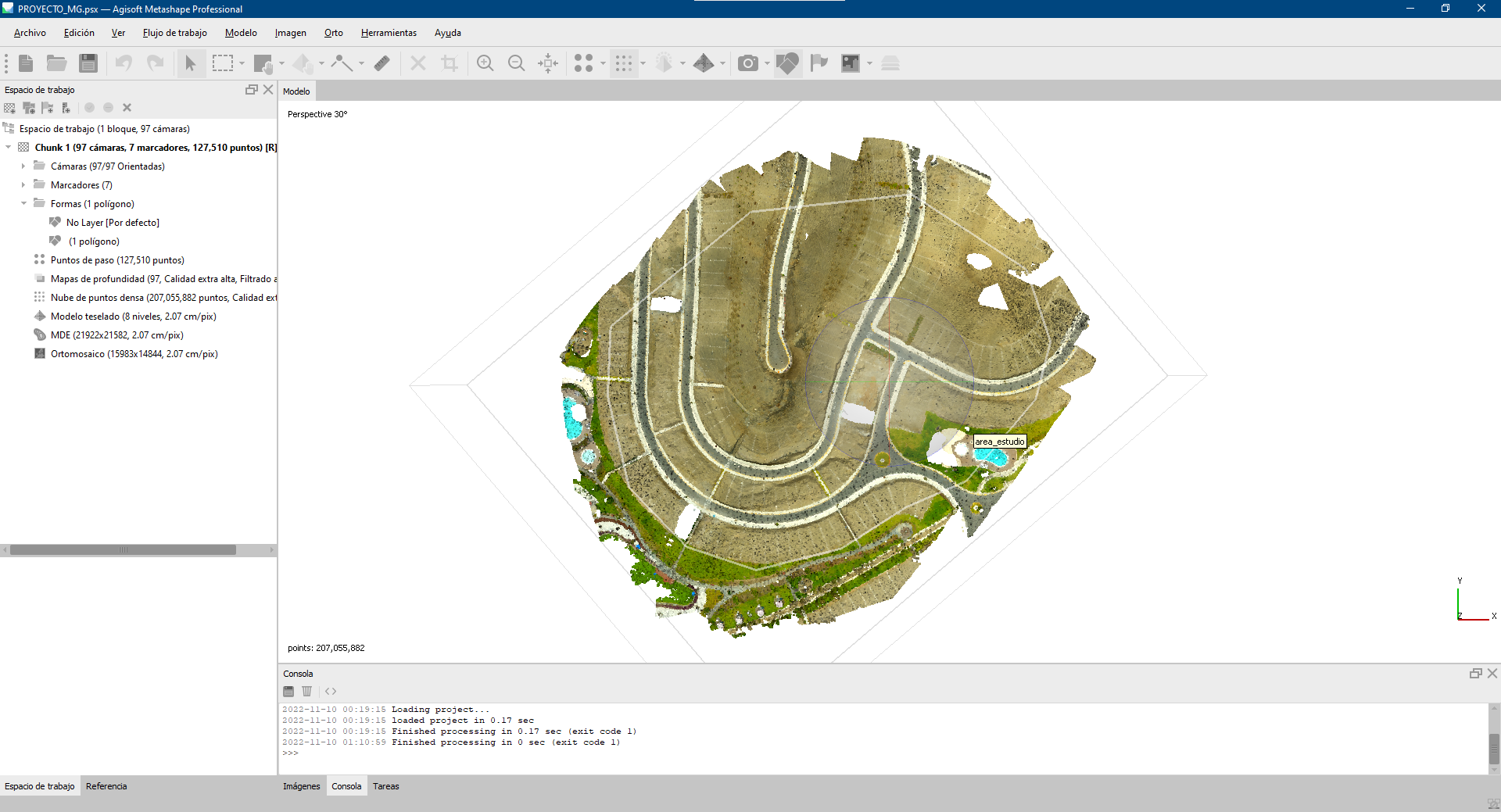
Ya en gabinete se extraen las fotografías del drone. Para el procesamiento se utiliza un software fotogramétrico como el pix4D o el agisoft metashape. Para el presente informe se utiliza el Agisoft. Se crea un nuevo proyecto con el sistema de referencia adecuado a la región donde se trabaje, se ingresan las fotografías y en el panel izquierdo aparecerá la información de cada una, junto con las coordenadas navegadas. En la pestaña Flujo de Trabajo se ingresa a la opción Orientar Fotos y se elige precisión alta o máxima para poder exportar los productos de terreno y se acepta, el procedimiento tomará varios minutos de acuerdo a la capacidad de la computadora.
Finalizada la orientación se convierten las coordenadas geográficas a coordenadas UTM, para esto en el módulo superior del panel izquierdo se selecciona la opción Convertir Coordenadas. Para el presente caso se elige el sistema WGS84 UTM Zona 18 Sur.
Luego se importan las coordenadas de los puntos de fotocontrol de un “.csv” o “.txt” verificando que las cabeceras de columnas coincidan con el contenido. Estos puntos y sus coordenadas se desplegarán en el módulo medio del panel izquierdo. Luego se selecciona el primero de los puntos de fotocontrol, clic derecho y Filtrar Fotos por Marcadores, se desplegará un módulo inferior con las fotografías donde hay coincidencias con los puntos de fotocontrol, seleccionar la primera con doble clic y de desplegará en la ventana de trabajo, debe aparecer el punto de marcador, si no aparece hacer clic en la opción Mostrar Marcadores en el módulo de la barra superior.
Entonces arrastrar el marcador al centro de la diana, el marcador en la fotografía cambiará a color verde, repetir el procedimiento para todas las fotografías correspondientes al punto de control filtrado. Luego se ingresa a la opción con ícono de estrella Optimizar Cámaras en el módulo superior del panel izquierdo. Se dejan las opciones por defecto o se marca la opción de Ajuste Adaptativo si corresponde al modelo de cámara y se pone aceptar.
Con esto el modelo se ajustará al primer punto de fotocontrol ingresado y será más sencillo repetir el procedimiento con los demás puntos de fotocontrol. Se siguen los mismos pasos para el filtrado y ubicación del marcador de los demás puntos de fotocontrol, por último debe hacerse una Optimización de Cámaras final. Si en alguna de las fotografías no hay suficiente detalle para ubicar el marcador, dejarlo sin mover y pasar a la siguiente fotografía. Este procedimiento de ubicar los marcadores sobre las dianas en las fotografías sirve para la correcta georreferenciación del modelo.
Luego se ingresa a la pestaña Flujo de Trabajo / Crear Nube de Puntos Densa, se elige la opción de calidad Alta y clic en aceptar. Este procedimiento tomará un tiempo considerable de acuerdo a la extensión del área de trabajo. Una vez finalizado se pueden seleccionar los puntos para depurar los que no corresponden al terreno, como edificios, árboles, vehículos, etc se eliminan.
Con la nube de puntos densa terminada se genera el Modelo de Teselas en calidad media y con este proceso finalizado se procede a general el DEM a partir de la nube de puntos densa, el ortomosaico a partir del modelo de teselas y las curvas de nivel a partir del DEM.
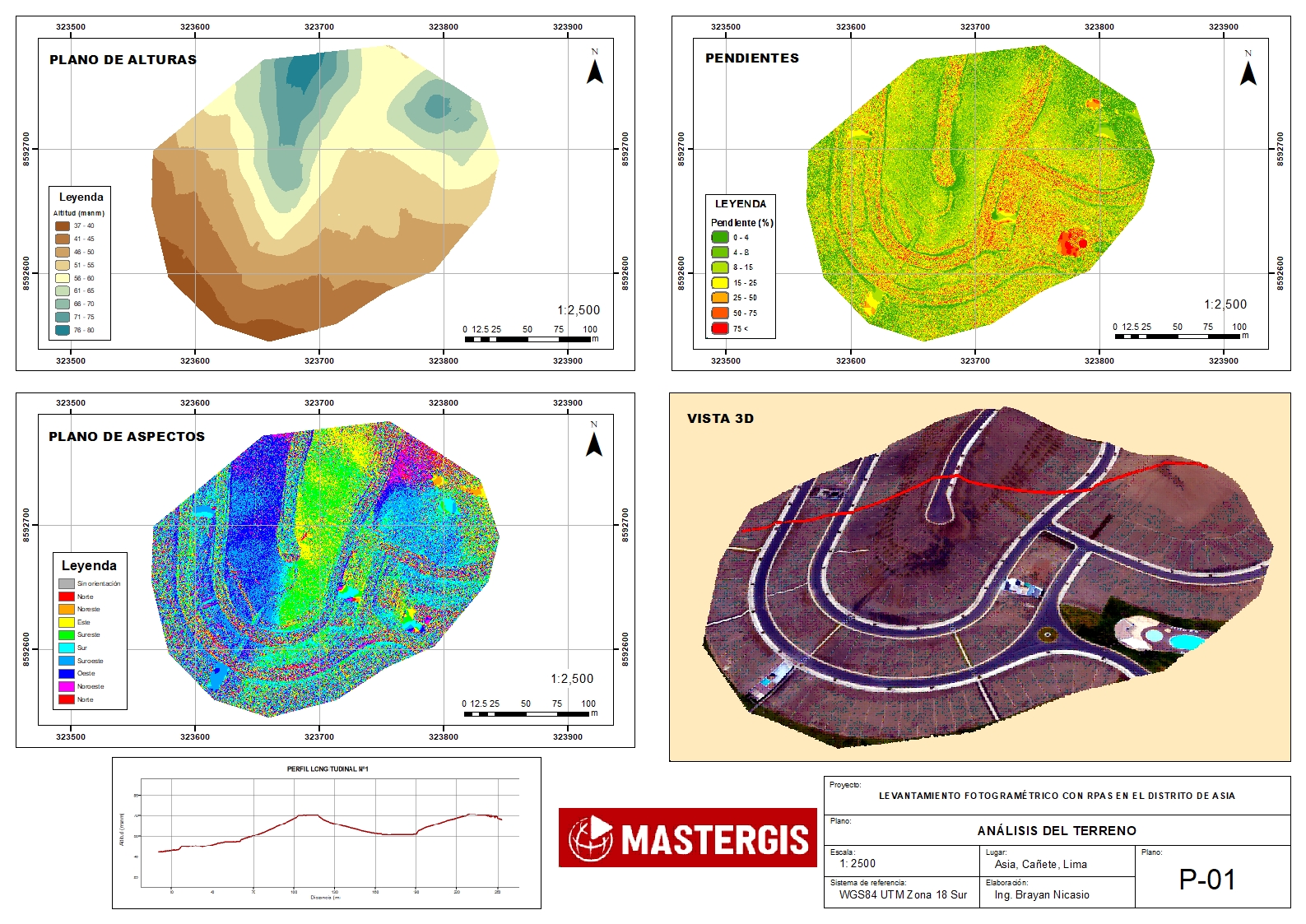
Estos productos son cargados a software GIS para su tratamiento y enmarcación en los planos requeridos como plano de pendientes, plano de aspecto y plano de alturas. Se agregó además una vista 3D de la superficie y un perfil longitudinal del mismo.
Fuente: Elaboración Propia
Fuente: Elaboración Propia

Fuente: Elaboración Propia

Fuente: Elaboración Propia
6.RESULTADOS
Plano final con el detalle de las alturas, pendientes, aspectos, superficie 3D y perfil para una mejor apreciación del relieve.

El área levantada es de 6 hectáreas, y su perímetro de 763m. La altitud mínima es de 37m y la máxima de 80m. La escala de los planos mostrados es de 1/2500. El porcentaje de error en el cálculo de la distancia focal es de 1.0123%, inferior al máximo recomendado de 3% por lo que el nivel de precisión es bueno.
El error en el plano XY es de 5.42 cm y considerando Z aumenta a 6.34cm. Parte de este error se debe a los errores sistemáticos del procesamiento. El análisis del reporte muestra los resultados y errores sistemáticos a detalle:



7.CONCLUSIONES
- Se realiza el levantamiento fotogramétrico de la zona de trabajo de forma exitosa.
- Se obtuvo un error final de 6.34cm para una extensión de 6 hectáreas.
- Se obtuvieron los productos de terreno del área de trabajo con las presentaciones apropiadas y sus respectivos distintivos cartográficos
8.RECOMENDACIONES
- Al realizar un levantamiento fotogramétrico convencional utilizar la cantidad de puntos de fotocontrol recomendada para obtener un buen nivel de precisión.
- Si se tratase de una zona de relieve accidentado se deberán agregar algunos puntos adicionales y/o realizar una segmentación de la zona de trabajo por niveles altitudinales para obtener un buen nivel de precisión.
- Realizar el procesamiento en el software fotogramétrico en nivel de precisión/calidad alta o muy alta para obtener productos más precisos.
9.REFERENCIAS BIBLIOGRÁFICAS
- http://www2.ual.es/drones/servicios/topografia-y-fotogrametria/
- https://grupoacre.pe/catalogo-productos/fotogrametria-con-drones/
- http://www.roboticairsystems.com/Downloads/informe-fotogrametria.pdf
REALIZADO POR
Brayan D. Nicasio Castañeda
PROYECTO DEL CURSO
Fotogrametría con Drones
José Oropeza